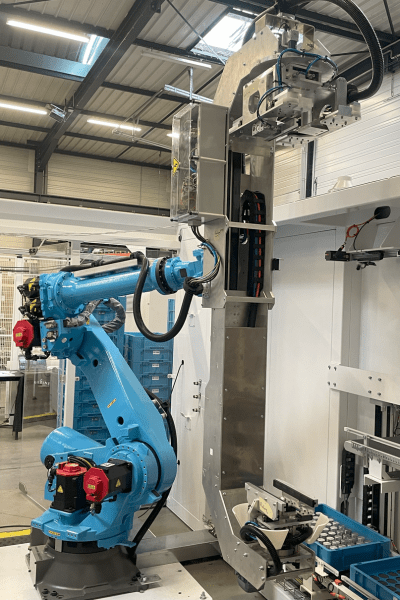
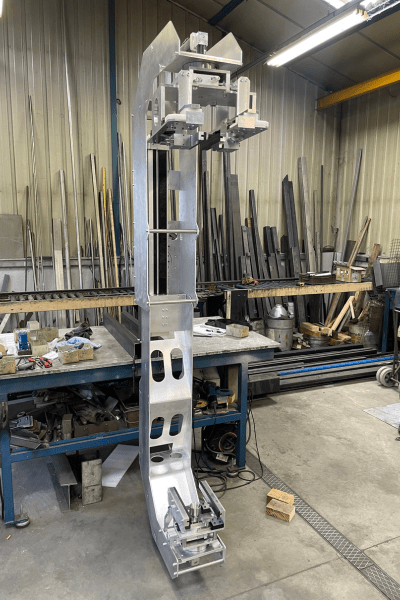
Préhenseur robot 6 axes
Sur cette page, nous vous présentons l’une de nos réalisations: Un préhenseur robot 6 axes innovant spécialement conçu pour un client dans le secteur de la robotique industrielle pour l’industrie des traitements de surface.
Ce projet illustre parfaitement notre capacité à travailler en équipe avec des sociétés spécialisées en robotique, en offrant des solutions efficaces et personnalisées. Découvrez comment nous avons relevé le défi d’améliorer le processus de manipulation de pièces de grande dimensions dans l’industrie 4.0.
Contexte du Projet
GDIF a été sollicité par un client spécialisé dans la production de cellules robotisées, désireux d’optimiser son processus de manipulation de pièces.
Le besoin était d’augmenter l’efficacité et la précision du transfert des pièces depuis des chariots roulants jusqu’à la machine d’accrochage.
L’objectif principal était de pouvoir manipuler différents types de pièces de différentes longueurs. Un préhenseur pou robot 6 axes devait donc être installé.
Objectifs du projet
Les principaux objectifs définis pour le développement de ce préhenseur spécifique comprenaient :
Conformer les pièces
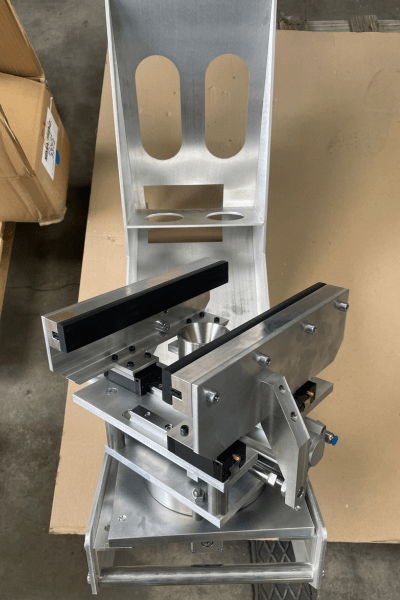
La position des pièces lors de la prise en charge étant aléatoire, ce préhenseur est capable de recentrer les pièces à une position précise.
S’adapter à différentes longueurs de pièces
Il était nécessaire que le préhenseur s’adapte aux différentes pièces de longueurs variables grâce à son axe linéaire électrique.
Permettre la rotation des pièces
Le positionnement angulaire des pièces est assuré par 2 moto réducteurs brushless fonctionnants en synchronisation ou en solo.
Garantir la fiabilité
Le système devait assurer que chaque pièce puisse être prise en charge sans possibilité de chute afin de ne pas perturber l’ensemble de la cellule robotisée.
Description détaillée de ce préhenseur
Fonctionnalités clés
-
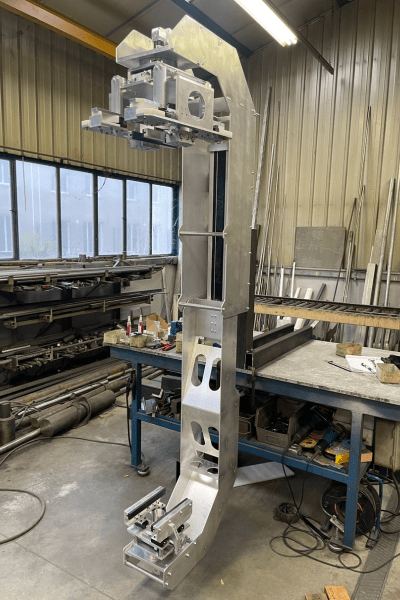
Conception légère en aluminium:
La structure du préhenseur est fabriquée en aluminium pour maximiser la capacité de charge du robot polyarticulé.
-
Positionnement
Chaque mouvement du préhenseur est contrôlé par des actionneurs numériques, garantissant un maximum de polyvalence.
-
Bridage des pièces sans faille
Le préhenseur permet un bridage parfait des pièces grâce à ses mains de préhension en matériaux souples, augmentant ainsi la flexibilité de l’équipement.
Innovations techniques
-
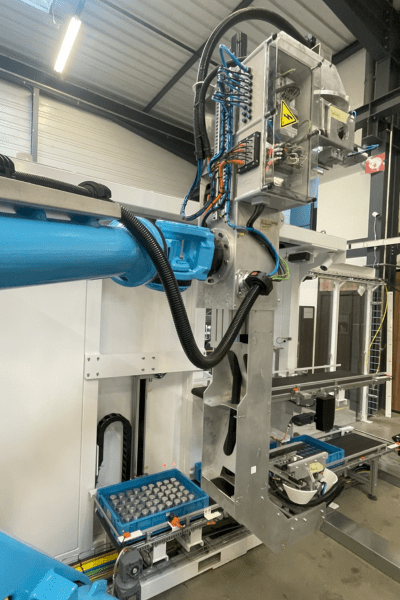
Design à très faible encombrement
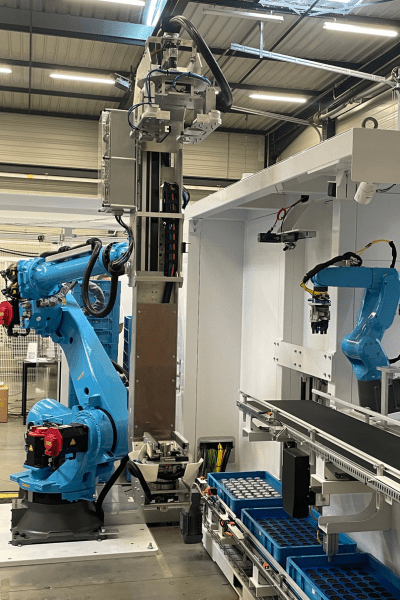
Le préhenseur a été conçu pour occuper le moins d’espace possible afin de permettre au second robot de venir accrocher les pièces sur toutes les positions possibles.
-
Rigidité du préhenseur
La structure du préhenseur encaisse des efforts relativement importants lors de l’accroche des pièces tout en limitant au maximum les oscillations de l’ensemble.
-
Recentrage des pièces automatique
Le système spécifique de GDIF assure la mise en référence des pièces afin d’avoir un positionnement fixe et répétitif.
Impact et résultats
Grâce à cette solution innovante, notre client a pu:
- Tout d’abord augmenter l’adaptabilité : En pouvant manipuler l’ensemble des différentes pièces de son client.
- Mais aussi améliorer la fiabilité du produit final : La précision du positionnement des pièces et la rigidité du préhenseur assurent une accroche des pièces à chaque cycle.
- Et puis réduire les arrêts de production : L’impossibilité de perdre une pièce pendant un cycle évite tout arrêt de production.
En choisissant GDIF, le client a bénéficié de notre expertise en conception de systèmes mécaniques automatisés, assurant une solution sur mesure parfaitement adaptée à ses besoins spécifiques.
Vous évoluez dans la robotique
Contactez notre bureau d’étude pour aborder vos besoins en périphériques de robotique.