Préhenseurs manipulateurs industriels
Prendre, manipuler, déposer une pièce ou un sous-ensemble de pièces grâce à nos équipements sur mesure malgré des contraintes importantes de forme, d’encombrement ou de masse.
Des préhenseurs et manipulateurs pour déplacer rapidement, efficacement vos pièces en toute sécurité.
Un préhenseur permet de saisir, agripper un objet comme le ferait une main humaine. Généralement, le préhenseur est embarqué sur un robot de type cartésien ou poly articulé, et permet le déplacement de pièces à grande cadence avec précision.
Un manipulateur industriel est plus souvent un moyen autonome pouvant être déplacé par un opérateur, son rôle est d’améliorer l’ergonomie de la manutention tout en garantissant la sécurité des opérateurs.
Nous concevons des préhenseurs manipulateurs industriels qui s’adaptent sur tous types de robots et autres moyens mobiles, pour garantir une prestation efficace, réalisée dans les règles de l’art au coût le plus juste.
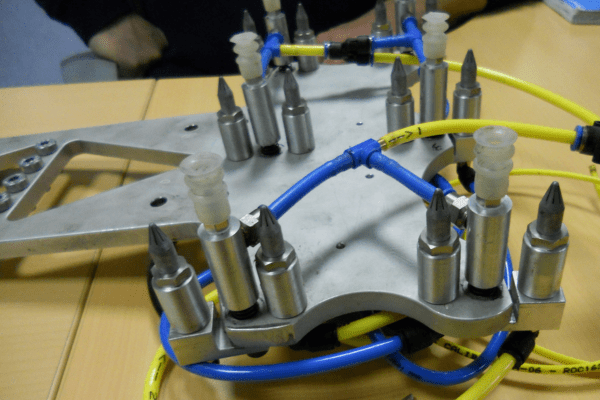
Les préhenseurs robotique
Nous concevons tout système de préhension spécifique pour déplacer des pièces de la taille d’un stylo ou de 4m de long.
Nos préhenseurs peuvent s’intégrer sur des manipulateurs, des robots cartésiens ou robots poly articulés.
Notre expérience nous permet de proposer différents systèmes selon votre besoin :
- Les principes mécaniques type « pinces » avec mâchoires à contrôle de serrage pour les pièces fragiles.
- Les systèmes de préhension par le vide avec ventouse à compliance.
- La préhension par électromagnétisme.
Nous savons gérer les différentes contraintes liées à l’intégration de préhenseurs tels que le poids et l’encombrement du préhenseur ou la fragilité des pièces à manipuler.
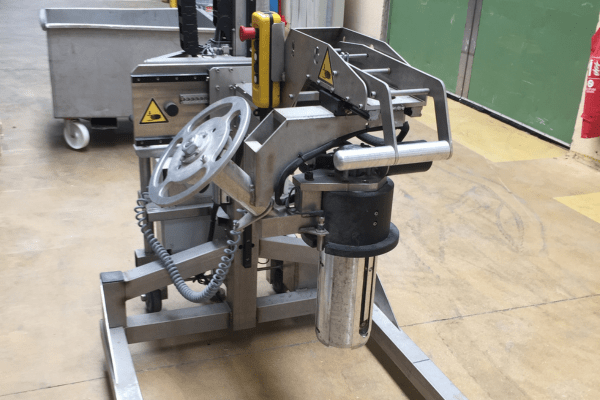
Les manipulateurs industriels
Vous devez manipuler des charges importantes ? GDIF propose des solutions sur mesure pour lever, déplacer, tourner tous types de pièces sur tous les axes.
Nos manipulateurs peuvent intégrer des mouvements électriques, pneumatiques, hydrauliques ou manuels (0 gravité).
De plus, nous avons réalisé plusieurs manipulateurs afin de diminuer considérablement les risques de TMS dans le domaine agroalimentaire et maitrisons ces contraintes particulières puisque ces bras de chargement répondent à la norme FDA.
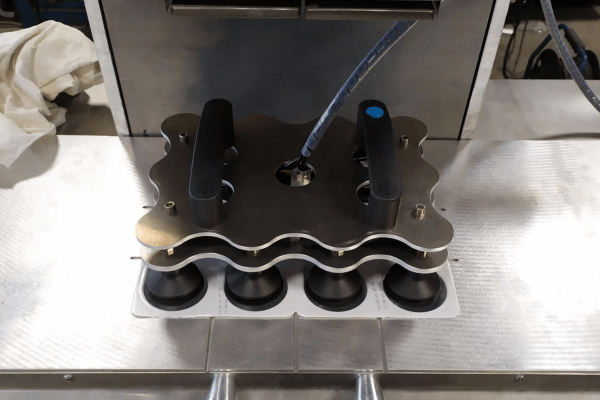
Les préhenseurs manuels
Ces préhenseurs sont destinés à être manipulés par des opérateurs.
Lorsqu’une pièce ou un sous-ensemble de pièces possède une forme difficilement préhensible par une main humaine, nous pouvons créer une interface dédiée entre la pièce et la main humaine.
Ces préhenseurs peuvent être de type mécanique (pince), par le vide (ventouse) ou magnétique (aimant). Ils permettront une meilleure ergonomie pour l’opérateur.